
At JavaLand we presented how to steer Anki Overdrive cars with IBM Bluemix via speech and gesture recognition. Since the cars send their position data to the cloud we could also demonstrate a simple version of collision prevention.
The demo is available as open source and I documented it in a series of blog entries (see below). My colleague David Barnes interviewed me and created the video Driving Cars autonomously with IBM Bluemix. Thanks a lot, David!
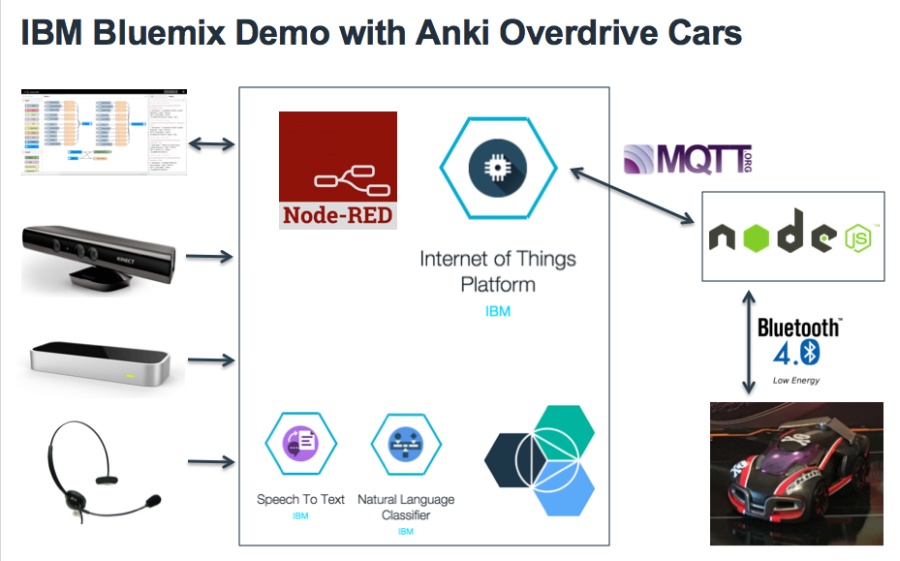
Here is the high level architecture with the main components IBM Bluemix, the Internet of Things platform and MQTT.
Here is the series of blog articles about this demo.